timing¶
Overview¶
timing provides a low-level C++ interface to the HD timing firmware. The HD timing firmware is highly modular. Several "base" firmware blocks are re-used and combined in different patterns to obtain different functionality, e.g. master vs. endpoint. The same top level firmware design can also run on several different IO/FPGA board combinations. The C++ code structure is envisioned to loosely mirror the structure of the firmware. For each firmware block, there is usually a C++ class which provides the necessary interface to control and monitor the firmware block. Certain firmware blocks also contain data event buffers which can be read out via the corresponding C++ class.
In order to facilitate rapid code prototyping, and low level debugging of hardware, firmware, and software, timing provides a python interface to a large section of the C++ code. The python binding of C++ code is achieved using the header only library pybind11, see: daq_add_python_bindings.
This package also provides the necessary schema and interface for the collection of operational monitoring information from the firmware and hardware supported by timing.
The different facets of the functionality provided timing are described in more detail in the following sections.
C++ firmware interface¶
All the C++ firmware interface classes are compiled into a single "core" library, libtiming.so, which other libraries or plugins within the DUNE DAQ environment can link against.
IPBus¶
Communication with firmware running on FPGA based hardware is achieved using IPBus, a packet-based control protocol for reading and modifying memory-mapped resources within FPGA-based hardware devices. The IPBus suite of software and firmware consists of the following components:
-
firmware modules implementing the
IPbusprotocol within end-user firmware -
uHAL, providing an end-user C++/Python API forIPbusreads, writes and RMW (read-modify-write) transactions -
ControlHub, a software application that mediates simultaneous hardware access from multipleuHALclients, and implements theIPbusreliability mechanism over UDP
The IPBus protocol provides the low-level communication operations, e.g. reading and writing firmware registers. These low level operations can then be grouped together into higher level functions, e.g. board reset or clocking IC configuration. A set C++ classes implement these functions, whilst also retaining access to the lower level read and write operations.
The memory layout of the various firmware blocks which make up a firmware is captured using IPBus address maps. These address maps allow the association of a particular firmware block with a particular C++ class. timing takes advantage of this feature to build its C++ firmware interface. The address maps of the various firmware designs supported by timing can be found in config/etc/addrtab/.
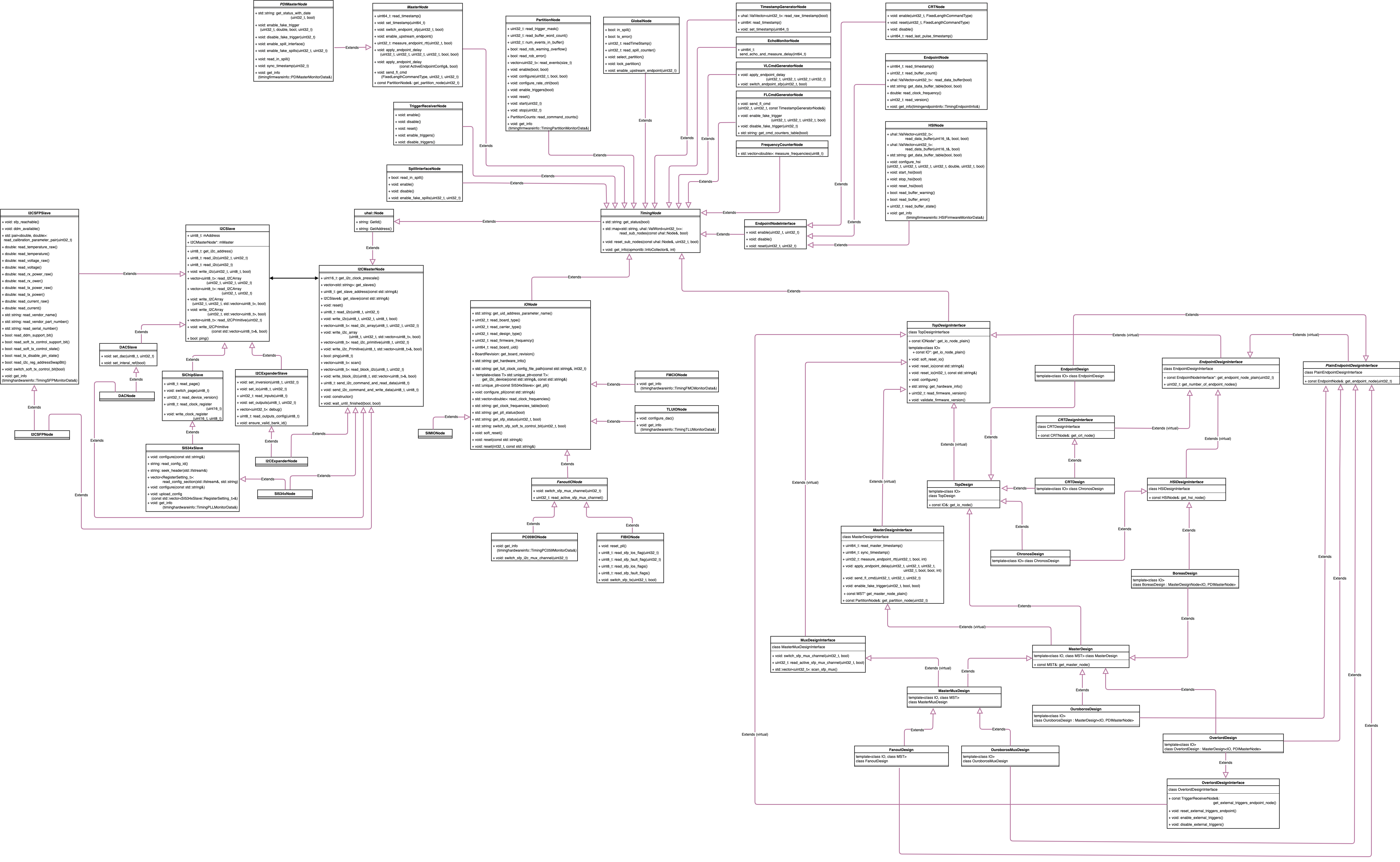
Class hierarchy¶
The interface for reading and writing registers of hierarchal firmware blocks or nodes is provided by the IPBus class, uhal::Node. Most timing C++ classes inherit from uhal::Node, via the common base class timing::TimingNode. The class hierarchy of timing can be seen in the UML diagram below.
Python interface¶
The C++ interface described above will be used by DUNE DAQ modules, written in C++, to control and monitor timing hardware. These DUNE DAQ modules can be found in the package, timinglibs. The interface provided by timing can also be used in a debug and development contexts, where python bindings allow exactly the same C++ code to be used in production or debug environments.
Bindings¶
The python binding is done using the library pybind11. The source files in the directory pybindsrc, expose the relevant C++ code via the sub-module core, which belongs to the package top level python module, timing.
CLI¶
To enhance the usability of the python bound C++ code, a command line interface (CLI) has been built using the click python package. The CLI is centred around command groups, where each command group targets a particular set of firmware blocks or functionalities. These command groups are listed below.
-
io: commands for interacting with the firmware block responsible for controlling theIOboard, e.g.SFPs,CDRandPLLICs. -
mst: commands for manipulating the firmware blocks providing thetiming masterfunctionality -
ept: commands for manipulating the firmware blocks providing thetiming endpointfunctionality -
hsi: commands for manipulating the firmware blocks providing theHSIfunctionality -
crt: commands for manipulating the firmware blocks providing theCRT endpointfunctionality -
debug: commands for various debug operations targeting hardware and firmware
The CLI is invoked through the executable python script, pdtbutler, located in the scripts directory.
Operational monitoring¶
A portion of the firmware interface classes implement a get_info method. The method takes as an arugment, a reference to a data structure, which it fills with its particular operational monitoring information. Several of these operational monitoring structures are combined together into one super-structure, which holds all the relevant information, e.g. hardware and firmware, about a particular timing device.
Last git commit to the markdown source of this page:
Author: Your Name
Date: Tue Apr 21 12:23:07 2026 -0500
If you see a problem with the documentation on this page, please file an Issue at https://github.com/DUNE-DAQ/timing/issues